Panoramic imaging utilizes a special imaging device to acquire multi-directional images 360° in the horizontal direction and 360° in the vertical direction from a viewpoint. Due to the large imaging range and fast imaging, it can be used for military surveillance, robot navigation, and virtual reality. In the field of computer vision, the stereoscopic perception and reproduction function of large-field scenes has been developed rapidly in recent years, becoming a research hotspot in optoelectronics, computer vision and computer graphics.
So far, there are mainly three methods for achieving panoramic imaging: image stitching, fisheye lens method and catadioptric panoramic imaging method [1]. One of the panoramic imaging methods based on image stitching is to make the camera image the scenes in multiple directions by rotating through the vertical axis of its optical center, and then stitch the scene images of these different directions into a single panorama. In this method, although the imaging resolution is high, the imaging speed is slow, and the splicing algorithm is complex. Generally, only the cylindrical panoramic image can be spliced, which cannot meet the single viewpoint requirement, and the cost is high, the system is complicated, and the real-time panoramic imaging needs cannot be met. The fisheye lens has the disadvantage of obtaining a large field of view, that is, it causes severe barrel distortion, is difficult to correct, and has low imaging resolution. High-quality fisheye lenses typically use more than 10 structures and high-quality optical materials, making the system complex and costly. The catadioptric panoramic imaging technology has the advantages of one-time large-scale imaging, excellent real-time performance, simple structure, no scanning parts, and no splicing, so it can be used as an important technology to replace the existing aerial panoramic camera. However, due to the existence of the UAV landing gear, when the astigmatic panoramic camera acquires the omnidirectional image, there are always problems such as incomplete image acquisition elements and low image quality due to the occlusion of the landing gear.
In this paper, a reversible bracket system is designed to prevent the UAV landing gear from affecting the field of view of the panoramic camera. After the ultrasonic sensor is used to measure the safe distance from the ground, the microprocessor controls the pan and tilt of the panoramic camera and the bracket to prevent the panoramic camera from proceeding. During the panoramic image acquisition, the drone landing gear falls into the image, improving the integrity of the image acquisition elements and the quality of the image, and obtaining a panoramic image with no landing gear interference.
1 The influence of the drone landing gear on the imaging field of the panoramic cameraGenerally, the UAV catadioptric panoramic imaging system consists of a drone, a catadioptric panoramic camera, and a data processing unit, as shown in FIG. The catadioptric panoramic camera image can obtain a large field of view scene image of 360° in the horizontal direction and 210° in the vertical direction. The catadioptric panoramic camera is usually placed directly under the fuselage body, but since the position of the landing gear on both sides of the drone is lower than that of the panoramic camera, the panoramic image always appears on the landing gear, which affects the further interpretation of the image, as shown in Fig. 2. Shown.

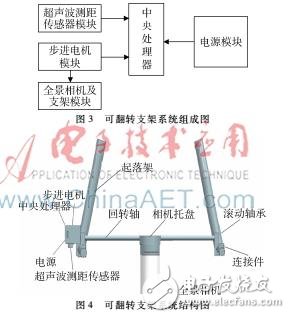
The reversible bracket system for preventing the drone landing gear from affecting the panoramic camera field of view is composed of an ultrasonic ranging sensor module, a stepping motor module, a central processing unit module, a panoramic camera and a bracket module, and a power module [2, 3], as shown in the figure. 3 is shown. The ultrasonic ranging sensor module is used to measure the vertical distance from the bottom of the UAV body [4-5], and the stepper motor [6] module is used to drive the vertical 180° flip of the panoramic camera and the bracket module. The module [7] controls the forward and reverse rotation of the stepping motor module according to the distance information measured by the ultrasonic ranging sensor module, and the power module is used to supply power to the system. The panoramic camera is placed in the middle of the rotating shaft at the bottom of the landing gear and is turned upside down by rolling bearings.
ZGAR bar 2000 Puffs
ZGAR electronic cigarette uses high-tech R&D, food grade disposable pod device and high-quality raw material. All package designs are Original IP. Our designer team is from Hong Kong. We have very high requirements for product quality, flavors taste and packaging design. The E-liquid is imported, materials are food grade, and assembly plant is medical-grade dust-free workshops.
Our products include disposable e-cigarettes, rechargeable e-cigarettes, rechargreable disposable vape pen, and various of flavors of cigarette cartridges. From 600puffs to 5000puffs, ZGAR bar Disposable offer high-tech R&D, E-cigarette improves battery capacity, We offer various of flavors and support customization. And printing designs can be customized. We have our own professional team and competitive quotations for any OEM or ODM works.
We supply OEM rechargeable disposable vape pen,OEM disposable electronic cigarette,ODM disposable vape pen,ODM disposable electronic cigarette,OEM/ODM vape pen e-cigarette,OEM/ODM atomizer device.

Disposable Vape, bar 2000puffs, ZGAR bar disposable, Disposable E-cigarette, OEM/ODM disposable vape pen atomizer Device E-cig
ZGAR INTERNATIONAL(HK)CO., LIMITED , https://www.sze-cigarette.com