Both fuzzy control and expert system control are within the scope of intelligent control. Intelligent control is the third stage of the development of control theory. In the first two stages, classical control theory and modern control theory are collectively referred to as traditional (or conventional) control theory. Their common feature is that various theories and methods are based on the mathematical model of the object. However, with the deepening of understanding and the expansion of the scope of understanding objects, people find that more and more control objects have high complexity and high degree of uncertainty, which is difficult to describe with accurate mathematical models, and people also Controls present ever-increasing performance requirements. For these systems, the traditional control theory seems to be a little powerless, and it is necessary to find a new theory and a new method.
This article refers to the address: http://
By researching and imitating human intelligent behavior, artificial intelligence is introduced into the control theory, which enters the third stage of the development of control theory - the stage of intelligent control theory. Intelligent control theory is the result of the intersection of multiple disciplines. It is based on conventional control theory and absorbs new ideas and methods in other sciences such as artificial intelligence, operations research, computer science, fuzzy mathematics, experimental psychology, and physiology. Developed. Its basic idea is to imitate human intelligence to effectively control complex uncertain systems. The intelligent control system can be divided into expert system control, fuzzy control, artificial neural network control, and human-like intelligent control according to the system composition principle. This article will introduce fuzzy control and its application in automotive clutches.
First, fuzzy control and fuzzy control system
Since 1973, when Professor Lazadeh of the University of California proposed the concept of fuzzy sets, the fuzzy theory has developed rapidly and applied to various disciplines, resulting in a series of cutting-edge disciplines such as fuzzy recognition and fuzzy control. By 1974, Momdoni successfully developed the first fuzzy controller, from which the fuzzy theory changed from a way of thinking to a specific application in control theory. The introduction of fuzzy control theory is an important breakthrough in the field of modern control theory and artificial intelligence. It is actually a long-term quantification of some complex and uncertain objects in nature that cannot be described by existing mathematical tools. Fuzzy description and control. Its basic idea is that human control experience is generally expressed in a language with considerable ambiguity. The form of these rules is the form of fuzzy conditional statements. Fuzzy mathematical methods can be used to describe process variables and control functions. These fuzzy concepts and the relationship between them can be based on the fuzzy relationship and the detection value of this process variable at a certain moment (need to be the amount of fuzzy) to obtain the control amount at this moment by fuzzy logic reasoning.
The basic structure of the fuzzy control system can be represented by Figure 1:
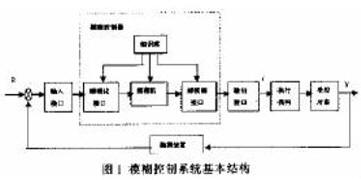
Generally speaking, the composition of the fuzzy control system is basically the same as that of the traditional control system, and is composed of a controller, an input/output interface, a detecting device, an executing mechanism, and a controlled object, except that the controller is a fuzzy controller. The fuzzy controller is mainly divided into four parts: fuzzy interface, knowledge base, inference engine, and defuzzification interface. The main function of the fuzzification interface is: range conversion, which maps the input values ​​to the corresponding input domain; fuzzification, which converts the input precise quantity into a fuzzy subset on the domain. The knowledge base contains knowledge of the application domain, mainly consisting of a database and a rule base. The database provides all the necessary definitions, including the universe of all input and output variables and the definition of all fuzzy subsets used in the rule base defined on these domains. The rule inventory fuzzy control rule is a knowledge model that controls the controlled object and is a summary of the operator or expert control experience. The inference engine mainly uses some kind of fuzzy inference method to derive the control output of the fuzzy controller from the input of the sampling moment and the fuzzy control rules. The main function of the defuzzification interface is: range conversion, which converts the domain of the output action into the range of the output physical quantity; the solution is fuzzy, and the fuzzy control effect is converted into an accurate value. The specific workflow of the fuzzy controller is as follows: the controller obtains an accurate input from the input interface, and transforms it into a fuzzy subset on the domain through the fuzzy interface. The inference engine checks the matching degree between the fuzzy input and the rule front, in conformity with a certain To some extent, the rule is excited, and an output fuzzy subset is obtained by the inference synthesis algorithm, and then the solution is fuzzified into an accurate physical output value, and is applied to the controlled object to complete a control operation.
Second, the application of fuzzy control in the clutch of the car
When the vehicle starts, it puts high demands on the clutch control. In the traditional mechanical shifting mechanism, the clutch is very complicated to operate. For example, the driver is required to accurately determine the position of the clutch half-joining point according to various road environmental conditions, loads and other factors to ensure a smooth starting of the vehicle. At the same time, the coordination of the clutch pedal and the accelerator pedal is required to be accurate and coordinated. The complicated operation requirements of the clutch can easily cause improper operation of the clutch, causing impact and wear during the starting of the vehicle. In response to these shortcomings and deficiencies, the vehicle is gradually replacing the manual operation with an automatic steering clutch.
The start control of the clutch has always been the difficulty and core of the electronically controlled mechanical automatic transmission control system. Since the external working environment and the driver's subjective intentions are constantly changing, and the vehicle itself is a time-varying, non-linear system, it is impossible to establish its precise mathematical model. The traditional control method should be controlled by computer. Firstly, the control target value should be set. According to the characteristic change of the controlled object and the environmental change, the negative feedback principle is used to continuously adjust to track the set target value. To design a controller that satisfies the control objectives, it is necessary to have a control mathematical model, that is, a mapping relationship or a certain functional relationship from input to output, and mathematical abstraction of the physical system of the controlled object. Therefore, it is difficult to solve the problem of starting control of the clutch by relying on the traditional or automatic control method based on modern control theory. The skilled driver can successfully achieve the smooth start of the car under various working conditions with rich driving experience. This special control ability of human beings can be simulated by computer, and the fuzzy logic control method based on the driver's experience can be expected to obtain better control effects. The driver's experience is formed into a control language rule, and appropriate linguistic variables and control parameters are selected under real-time conditions to achieve reasonable control of the clutch.
(1) Control objectives
The fuzzy control of the clutch during the vehicle start-up can ensure that the vehicle can adapt to the driver's intention to start smoothly. The specific performance is: when the driver's throttle is stepped on and the throttle is stepped faster, it means that the driver wants to start quickly or the ground resistance is large at this time, so the clutch speed should be faster; otherwise, when the throttle When the pedal is small and the throttle is depressed, it means that the driver wants to start smoothly or the road resistance is small, so the clutch speed should be slower. The situation between these two conditions can be divided into countless kinds, and the conclusions are both non-linear and very diverse. In general, the fuzzy control method is to achieve automatic start control of the clutch under different driver intentions and different road conditions.
(2) Input and output parameters of fuzzy control
1. Input parameters
Since the control target is to realize the automatic control of the clutch according to the driver's intention and the change of the road condition, the difference of the road environment conditions can be reflected according to the intention of the driver to step on the accelerator pedal. The parameters that better reflect the driver's intention should be selected as the input parameters of the fuzzy control.
(a) Accelerator pedal displacement value In the electronically controlled mechanical automatic shifting control system, the manual operation of the clutch is eliminated, and only the accelerator pedal is retained by the driver. The driver's starting intention can be judged from the accelerator pedal signal. The deeper the accelerator pedal is, indicating that the driver wants a shorter starting time, even though the impact is large at this time; if the pedal is shallow, it means that the vehicle is expected to start smoothly, so To slow down the speed of bonding.
(b) Accelerator pedal displacement change rate The accelerator pedal displacement change rate is also an important parameter reflecting the driver's intention. The accelerator is too fast, indicating that the driver wants to start faster; on the other hand, if the throttle is slow, it means that the driver wants to start at a lower combined speed. Therefore, the displacement of the accelerator pedal and its rate of change are selected as two input parameters of the fuzzy control. In this process, the relationship between the two parameters is juxtaposed, but the importance of the accelerator pedal displacement is slightly greater than the rate of change of the accelerator pedal displacement.
2. Output parameters
(a) The clutch half-joint clutch is one of the most critical components in the transmission. It ensures that the engine is started at no load, allowing the vehicle to achieve a smooth start and prevent overload during emergency braking. The clutch engagement process is more complicated. When the vehicle is driving on different roads, the load is different, and the gear position is different, the clutch engagement process is different. Therefore, the theoretical analysis of the clutch engagement process is important for research.
Although the position of the clutch half-joint is often changing, this does not affect the clutch engagement law. Therefore, the clutch control should first study the clutch engagement law. From the perspective of maximizing vehicle performance, optimization of powertrain performance parameters is important. The clutch engagement law is one of the main factors affecting the performance of the drive train. The speed increase process between the vehicle and the minimum stable speed depends on the clutch engagement mode, so the in-depth discussion of the engagement law is essential for studying the powertrain parameter optimization.
The clutch engagement process can theoretically be divided into three stages, as shown in Figure 2.
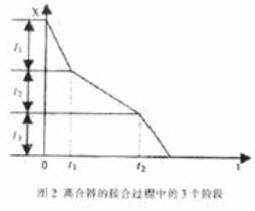
(1) Empty stroke phase l1: This phase is used to eliminate the clearance of the dual friction surface of the clutch. It has no effect on the vehicle and the clutch and should be completed as soon as possible. (2) Sliding stage l2: At this stage, the main driven piece produces a slip grinding, starts to generate torque and gradually increases the torque until the maximum rolling resistance is overcome, so that the vehicle starts to move. The clutch has the greatest influence on the joint quality during this phase.
(3) Synchronous engagement phase l3: In this phase, the slippage stops, the torque is no longer increased, and the clutch has no effect on the joint quality, and should be terminated as soon as possible.
The first phase and the third phase have no effect on the vehicle and the clutch under various conditions, and the clutch is required to be quickly combined. Only the second phase, that is, the sliding phase, is precisely controlled. In fact, the sliding phase can be divided into two phases: the first phase is from the moment after the clearance is eliminated to the moment when the friction torque is equal to the load moment, at which time the vehicle is in the moment of being moved; the second phase is from the start of the vehicle to the movement The clutch master slave axis is synchronized. If the stroke of the clutch is set to a semi-joining point when the vehicle starts to move, the value of the clutch half engagement point varies with the load. The road surface resistance is large, and the value of the half joint point is correspondingly large; on the contrary, the road surface resistance is small, and the value of the half joint point is correspondingly small. Accurate measurement of the half-joint point is currently a difficult point, and the existing measurement methods cause overshoot of the clutch control to varying degrees. Calculating the semi-joint point If the mathematical model cannot be established by the traditional algorithm, it is ideal to calculate the semi-joining point by the fuzzy control method for this feature. Therefore, the half engagement point of the clutch is defined as one of the outputs of the fuzzy control.
(b) Clutch combined speed The vehicle is controlled from the start to the complete synchronization of the clutch main driven shaft, and the control of the clutch engagement speed is crucial. Because of the consideration of driving intent or from the perspective of clutch life, this phase of control affects the effectiveness of the entire control process. If the driver's intention is to hope that the vehicle will start quickly, the speed of the combination must be speeded up; if the driver's intention is to hope that the vehicle starts slowly, the speed of the combination must be slowed down. Therefore, the coupling speed of the clutch at this stage is also determined as the output parameter of the fuzzy control.
(III) Analysis of control process
The control of the clutch at the start of the vehicle is a non-linear process. Fuzzy control can be based on some characteristics of the system; intuitive reasoning based on rich and reasonable experience, online determination and change control strategy.
First, according to the collected accelerator pedal displacement values ​​and their rate of change, they are separately blurred and quantized. Fuzzy quantization is the conversion of an accurate digital quantity into a fuzzy quantity, that is, the precise quantity of the input is transformed into a corresponding membership function. The membership function has a bell shape, a trapezoid shape, a triangle shape, etc. It is generally considered that the bell shape is the best, but it is difficult to calculate; the triangle is second, and finally the trapezoid. Here, for the convenience of calculation, a triangle membership function is selected. The membership functions of the accelerator pedal displacement and its rate of change are shown in Figures 3 and 4.

11 is the accelerator pedal displacement membership degree, μ2 is the membership degree of the accelerator pedal displacement change rate; X is the magnitude of the accelerator pedal displacement value, and Y is the magnitude of the accelerator pedal displacement change rate. It is convenient for X and Y to be changed from 0 to 100 in order to calculate the membership. When calculating the fuzzy control output specifically, they are converted into actual values. The output parameters are then blurred, as shown in Figures 5 and 6.
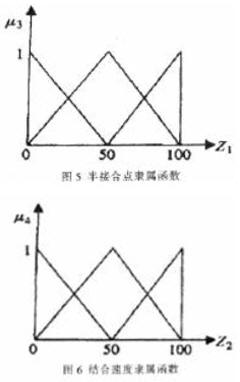
Where μ3 is the semi-joining degree membership degree, μ4 is the binding speed membership degree; Z1 is the value of the semi-joining point, and Z2 is the value of the bonding speed. By the same token, in order to calculate the degree of membership, the value of the half-join point and the value of the combination speed are first changed from 0 to 100, and then converted to the final output.
Then a series of fuzzy inference rules are established. There are 2 input parameters here, and the combination of various input parameters will get different outputs. The fuzzy inference rule is determined based on the life expectancy function of the clutch and the experience of an excellent driver.
During the entire engagement of the clutch, the joint should be smooth and soft, and the sliding work should be reduced to minimize wear and extend the life of the clutch. This is a requirement for the performance of the clutch. To evaluate these two requirements, you can establish their objective functions separately.
(a) Joint smoothness objective function. The greatest influence on the joint rideability is the drive train torque fluctuation caused by the engagement of the clutch. Therefore, the rate of change of the longitudinal acceleration of the vehicle body, that is, the impact degree j can be used as an evaluation index.
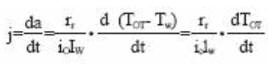
Where: TOT—transmission output shaft torque
Io-transmission output shaft to drive wheel ratio
IW—Inertia connected to the output shaft of the transmission
Rr—drive wheel radius
j is proportional to the derivative of the clutch engagement torque. The larger the fluctuation value dTot/dt, the larger j, which can better reflect the dynamic nature of the clutch engagement process. Since the main research is how to get the vehicle's adaptive driver's intention to start, sometimes it has to sacrifice the impact at the expense of quick start, so consider the life expectation function of the clutch more.
(b) Clutch life objective function: The clutch life objective function is defined as follows: during the engagement of the clutch, the main component and the driven component are subjected to a slipping process in which the rotational speed is not equal to the rotational speed, and the clutch is frequently engaged and slipped. The friction plate is easily worn, and the heat generated by the sliding friction increases the temperature of the pressure plate and the flywheel element, which aggravates the wear of the friction plate and reduces the service life of the clutch. Therefore, the work can be evaluated by sliding the work. During the clutch engagement process, it is desirable that the slippery work is as small as possible, so the objective function is:

Where: Tc—clutch friction torque
We, Wn—engine, clutch driven shaft angular velocity
W—sliding work
It can be seen from the above formula that when the clutch friction torque is constant, the longer the slip time, the greater the sliding work. Therefore, from the aspect of controlling the size of the sliding work and preventing the excessive sliding work, it is necessary to limit the slip time when starting on a road with high resistance. On the other hand, when the accelerator pedal displacement is large and the rate of change of the accelerator pedal displacement is large, in addition to the possibility that the road surface resistance is large, it is also possible that the driver wants to start quickly, although the impact is relatively large at this time, the combination requirement for the clutch is also I hope to combine quickly.
By analogy, a set of fuzzy inference rules can be derived from the consideration of the life of the clutch and the experience of the driver, thus establishing a fuzzy inference rule table.
After the specific parameters are input, the fuzzy output results are obtained through the processing of the fuzzy inference rule table and the Mamdani fuzzy inference method.
The final step of the fuzzy calculation performed after the fuzzy inference is completed: the defuzzification process, where the center of gravity method is used. After the batch fuzzification process, the exact value of the fuzzy control output parameter is obtained, and the exact value can be used to control the clutch integration process.
Fuzzy control is very effective for the control of the vehicle starting clutch. It can solve the problem that the vehicle system is difficult to establish a mathematical model and difficult to accurately control, and its control effect is satisfactory.
Third, the conclusion
The emergence and development of fuzzy control theory is not the backwardness of control theory from the determination of thinking, but the spiraling advancement; instead of completely replacing ambiguity with precision, it admits that approximation of precision to ambiguity is fuzzy theory in the field of control theory. Reappearance.
It is a scientific bridge between human beings to blur the natural thinking and mechanical precision thinking. It provides effective tools and means for solving problems such as giant system, man-machine system and artificial intelligence.
MARSHINE Hydraulic Compressor Feature:
Used for crimping guide wire and copper and aluminum terminals.
MARSHINE Hydraulic Compressor Instructions:
Equipped with double tube ultra high pressure Hydraulic Pump Station;
Supporting press die is purchased separately;
With iron packing cases.
Ningbo MARSHINE Power Technology Co., Ltd. is a professional engaged in the development, design and manufacture of power engineering construction equipment and tools.
MARSHINE company produces circuit construction tools, including foundation construction, tower group lap. Wiring structure. Cable construction, cable construction, mobile knife mill, insulated overhead cable and high voltage cable stripper, all kinds of aluminum alloy pull rod, guide rail, grounding device, high strength shackle, ratchet wrench and pointed wrench, double hook tight line device, lifting pulley, nylon wheel and aluminum wheel, punching machine ect.
MARSHINE continues to carry forward the enterprise spirit of "integrity, development, innovation" and strive for the prosperity and development of the electric power industry.
Welcome to contact MARSHINE and reach cooperation, thank you!
Hydraulic Compressors,Hydraulic Air Compressor,Hydraulic Screw Compressor,Hydraulic Drive Air Compressors
MARSHINE , https://www.puller-tensioner.com