Tactile sensation is a general term for mechanical stimuli such as contact, sliding, and pressure. The tactile devices of most animals are all over the body, like human skin is located on the human body surface, and it is spread all over the body. There are many kinds of tactile devices, some feel hot and cold, some feel itchy, and some feel smooth or rough, different. The skin of the part is not the same as the touch of different things, because the number and type of different receptors are different. Humans have many receptors on the face, lips, fingers, etc., so these parts are very sensitive.
The perception of human skin is qualitative but not quantitative. The tactile sensor can imitate human skin. What is even more amazing is that it can express the feelings of temperature, humidity and force in a quantitative way, and even help the disabled to obtain the lost sensory ability. For example, a new type of hairy electronic skin enables the robot to quickly distinguish between slight air fluctuations caused by breathing or weak heartbeat vibrations. This sensor is even more sensitive than human skin and can be used in a wide range of prosthetics, heart rate monitors and robots.
The main function of the touch sensor
Detection function
The detection function includes detecting the state of the operation object, the contact state of the robot and the operation object, and the physical properties of the operation object.
Identification function
The recognition function extracts the shape, size, stiffness and other characteristics of the operation object on the basis of detection for classification and target recognition.
The development of tactile sensorsResearch on robotics in foreign countries in the 1970s has become a hot topic, but the research on tactile technology has only begun and rarely. At that time, the study of touch was limited to the contact force with the object. Although there were some good ideas, the sensors developed were few and simple.
The 1980s is a period of rapid growth in the research and development of robotic tactile sensing technology. During this period, a lot of researches have been done on sensor design, principles and methods, including resistance, capacitance, piezoelectric, thermal electromagnetic, magnetoelectric, force, light, and ultrasound. Principles and methods such as resistance strain. In general, the research in the 1980s can be divided into three parts: sensor development, tactile data processing, and active tactile perception. Its outstanding feature is the focus on sensor device research for industrial automation.
Research on tactile sensing technology continued to grow and develop in many directions in the 1990s. According to the broad classification, the literature on tactile research can be divided into: sensing technology and sensor design, tactile image processing, shape recognition, active tactile perception, structure and integration.
In 2002, American researchers installed tactile sensors on the top of the catheter for endoscopic surgery to detect the stiffness of diseased tissue and apply appropriate strength to the softness of the tissue to ensure safe operation.
In 2008, Kazuto Takashima and others in Japan designed a piezoelectric three-dimensional force tactile sensor, installed it on the smart finger end of the robot, and established a liver simulation interface. The surgeon can sense the information of the liver lesion by controlling the robot's dexterous hand. , performing closed surgery.
In 2009, Marcus Meirart of the Fraunhofer Institute for Manufacturing Technology and Applied Materials in Germany developed an octopus underwater robot with a new haptic system that accurately senses obstacle conditions and automatically performs surveys of the seabed environment. .
Tactile sensor classificationIn the technical research of robot perception, tactile sensors are extremely important. Tactile sensor research has broad and narrow meanings. The generalized sense of touch includes touch, pressure, force, slip, cold and heat. The narrow sense of touch includes the sense of force on the interface between the robot and the object. From the perspective of function, tactile sensors can be roughly classified into contact sensors, force-torque sensors, pressure sensors, and sliding sensors.
Piezoresistive tactile sensor
A piezoresistive touch sensor is made by utilizing the property that the resistivity of the elastomer material changes with the change of the pressure, and changes the pressure signal on the contact surface into an electrical signal.
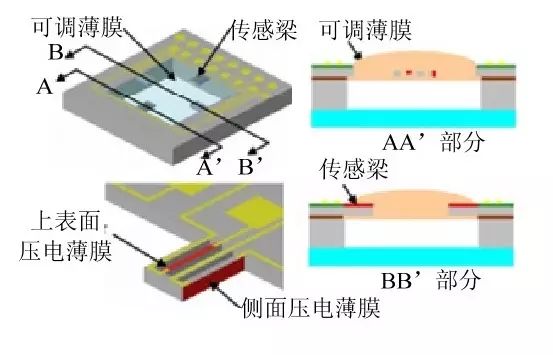
In 1981, researchers sandwiched carbon fiber and carbon felt between metal electrodes to form a piezoresistive sensor. In 1999, the Chinese Academy of Sciences used force-sensitive resistors to produce array-type tactile sensors capable of detecting three-dimensional contact force information. In 2007, National Taiwan University A three-axis tactile sensor with adjustable sensing range and sensitivity was designed by using polymer piezoresistive composite film. The three-axis tactile sensor is composed of four sensing cantilever beams and a polymer piezoresistive composite film attached to the surface and sides of each cantilever beam.
Light sensing robot tactile sensor
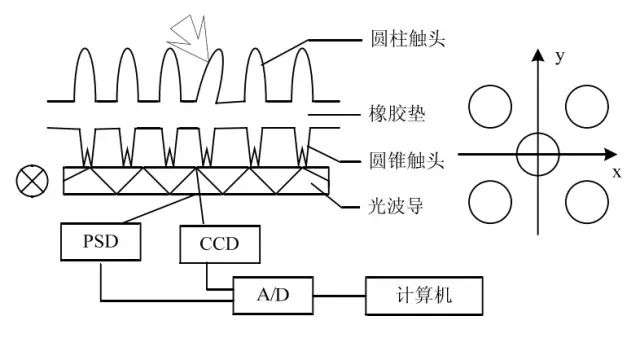
A tactile sensor capable of detecting three-way force based on the principle of optical waveguide designed by Nanjing University of Aeronautics and Astronautics. The tactile sensing system is composed of a force sensitive silicone rubber cylindrical contact and a conical contact, and the cylindrical contact has a one-to-one correspondence with the conical contact on the other side of the rubber pad. The new photoelectric sensitive device PSD can not only detect the three-direction force, but also determine the force position information. And the tactile sensor is compatible with the output of the vision sensor and is suitable for robotic real-time force control and active haptic systems.
Capacitive effect robot tactile sensor
The principle of the capacitive touch sensor is to change the relative position between the two plates under the action of an external force, thereby causing a change in capacitance, and acquiring the force information by detecting the amount of change in capacitance. In 2008, the flexible capacitive touch sensor developed by the State Key Laboratory of Sensing Technology, Shanghai Institute of Microsystems and Information Technology, can measure the contact force of the surface of an object of any shape.
Magnetically conductive robot tactile sensor
The magnetically-induced tactile sensor changes the magnetic field under the action of an external force, and converts the change of the magnetic field into an electrical signal through the magnetic circuit system, thereby sensing the pressure information on the contact surface.
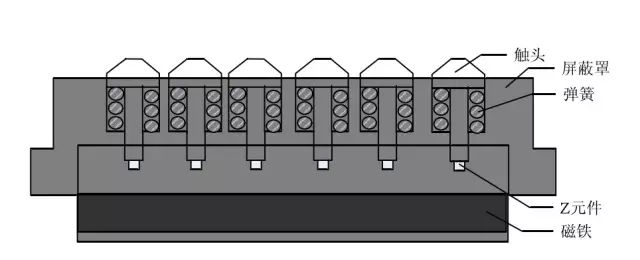
A tactile sensor based on a magnetically sensitive Z element designed by the Robot Research Institute of Harbin Institute of Technology, in which a magnetically sensitive Z element can output an analog voltage signal that varies proportionally with the strength of the magnetic field, with high sensitivity and low operating conditions, as long as variations are provided. The magnetic field will work. The intensity of the magnetic field in the air is reduced by the plate magnet as a sensitive source of the Z element. The force is converted into the distance between the Z element and the magnet by measuring the elastic device, and the distance between the Z element and the magnet corresponds to the change of the magnetic field strength. Thus, by converting the magnetic field strength parameter into a displacement parameter and then converting it into a force parameter, the purpose of the force measurement is achieved.
Magnetically conductive tactile sensors have the advantages of high sensitivity and small size, but are less practical than other types of robotic tactile sensors.
Piezoelectric robot tactile sensor
Piezoelectric conversion elements are typical force-sensitive components, which have important characteristics of spontaneous charge reversibility, and have the advantages of small size, light weight, simple structure, reliable operation, high natural frequency, high sensitivity and signal-to-noise ratio, and stable performance.
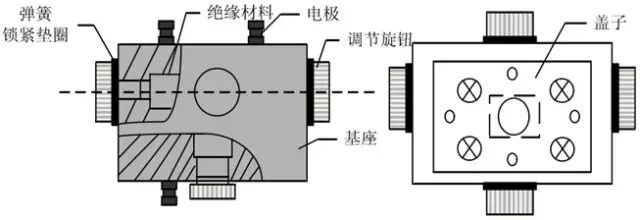
In 2004, Chongqing University designed a tactile sensor that uses piezoelectric sensitive materials to detect three-way forces. The sensing head portion is mainly composed of a base, a cover, a sensor core, an adjustment mechanism, and the like. The inner core portion of the sensing head is mainly composed of five identical piezoelectric elements, a square solid carbide, a cylindrical cemented carbide, and a length of copper.
Contact sensor
The contact sensor is used to determine whether the robot is in contact with an external object or a sensor that measures the characteristics of the object to be contacted. There are mainly the following types.
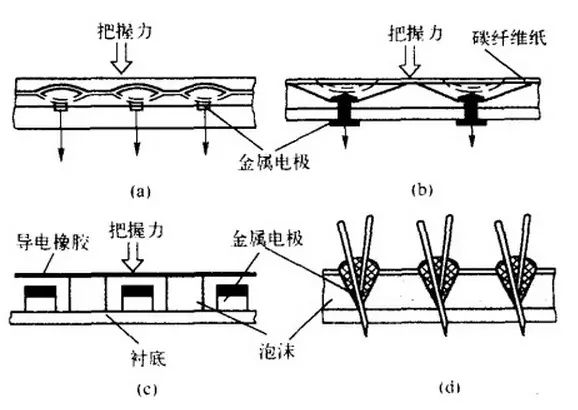
Micro switch type: consists of a spring and a contact. When the contact contacts the external object and leaves the substrate, the signal path is broken, thereby detecting contact with an external object.
Conductive rubber type: It uses conductive rubber as a sensitive component. When the contact is pressed against an external object, the conductive rubber is pressed to change its resistance, so that the current flowing through the conductive rubber changes.
Carbon-containing sponge type: It is provided with an elastomer composed of a sponge on a substrate, and a carbonaceous sponge is arranged in an array in a sponge. After the contact object is pressed, the resistance of the carbon-containing sponge is reduced, and the magnitude of the current flowing through the carbon-containing sponge is measured to determine the degree of compression.
Carbon fiber type: carbon fiber is used as the upper surface layer, the lower surface layer is the substrate, and the middle is filled with a urethane and a metal electrode. When contacting an external object, the carbon fiber is pressed and electrically connected to the electrode.
Pneumatic reset type: It has a flexible insulating surface that deforms when pressed, and compressed air acts as a resetting force when it comes out of contact. When it comes into contact with an external object, its internal elastic bubble (yttrium copper foil) is in contact with the lower contact and conducts electricity.
Force-torque sensor
A sensor for measuring the force or moment generated by the robot itself or interacting with the outside world. It is usually mounted at the joints of the robot. The motion of a rigid body in space can be described by six coordinates, for example, three coordinate coordinates representing the position of the rigid body centroid and angular coordinates rotated around three orthogonal coordinate axes, respectively. A variety of structural elastic sensing elements can be used to sense the six degrees of freedom of force or moment experienced by the robot joint, and the components of the force or moment can be applied by the strain gauges attached thereto (see semiconductor strain gauges, resistance strain gauges). Convert to the corresponding electrical signal. Commonly used elastic sensitive elements are in the form of a cross-type, three vertical elastic beams and eight elastic beams. Tensile strain gauges are attached to the inside of each beam, and strain gauges are measured by the outer shear force to form a force and moment component output of six degrees of freedom.
Pressure sensor
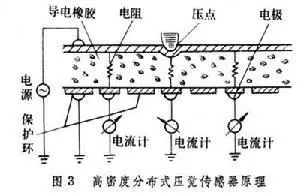
A sensor that measures the pressure and pressure distribution when exposed to an external object. It helps the robot to recognize the geometry and hardness of the contact object. The sensitive components of the pressure sensor can be made of various pressure sensitive materials, and commonly used are pressure-sensitive conductive rubber, filamentous carbon fiber sheets sintered from carbon fibers, and arranged surfaces of rope-like conductive rubber.
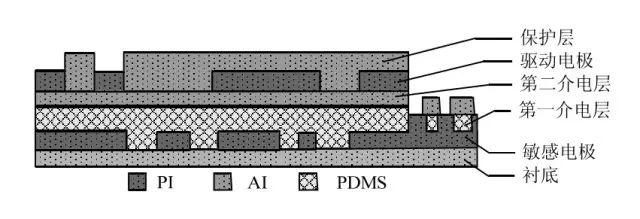
The figure shows a pressure sensor based on a pressure sensitive conductive rubber. A flexible protective layer is attached to the conductive rubber, and a glass fiber protective ring and a metal electrode are disposed on the lower portion. Under the action of external pressure, the resistance of the conductive rubber changes, so that the current of the base electrode changes accordingly, thereby detecting the electrical signal and pressure distribution in a certain relationship with the pressure. The size of the resistor can be controlled by changing the infiltration composition of the conductive rubber. For example, infiltration of graphite can increase resistance, and carburizing and nickel infiltration can reduce electrical resistance. High-density distributed pressure sensors can be made by reasonable material selection and processing. This type of sensor can measure subtle pressure distributions and their changes, so some people call it "artificial skin."
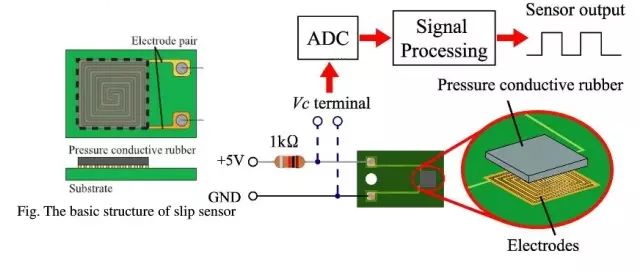
Sliding sensor
It is used to judge and measure the slip caused by the object when the robot grips or transports the object. It is actually a displacement sensor. The two electrodes are alternately coiled into a spiral structure and placed on an epoxy resin glass or a soft cardboard substrate, and the force-sensitive conductive rubber is mounted directly above the electrodes. During the operation of the sliding sensor, by detecting the voltage signal between the positive and negative electrodes and converting it into a digital signal through the ADC, the DSP chip is used for digital signal processing and the result is output to determine whether the object slips.
The sliding sensor can be classified into three types: non-directional, unidirectional and omnidirectional, depending on whether or not the sliding direction detection function is used.
The non-directional sensor has a probe earphone type consisting of a sapphire probe, a metal bumper, a piezoelectric Rochelle salt crystal, and a rubber bumper. The probe vibrates as it slides and is converted to the corresponding electrical signal by the Rochelle salt. The role of the buffer is to reduce noise.
The unidirectional sensor has a roller photoelectric type, and the sliding of the grasped object causes the drum to rotate, so that the photodiode receives the light signal transmitted through the code wheel (mounted on the circular surface of the drum), and the object is detected by the rotation angle signal of the drum. Sliding.
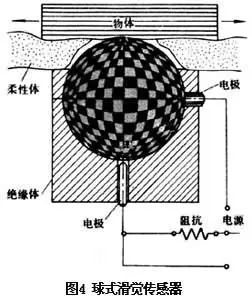
The omnidirectional sensor uses a conductive and non-conducting metal ball on the surface of which is covered with an insulating material and constitutes a distribution of warp and weft. When the sensor contacts the object and produces sliding, the ball rotates, so that the conductive and non-conducting regions on the spherical surface alternately contact the electrode, thereby generating an on-off signal, and the magnitude and direction of the slip can be measured by counting and judging the on-off signal. .
Application of tactile sensor in prosthesis
Prosthetics can miraculously restore the functions lost by some amputees, but they still can't accomplish one thing yet, that is to restore accurate touch. Now, researchers report that in the near future, these artificial arms and legs are likely to get close to real touch. Using a two-layer, flexible, thin plastic, scientists have developed a new electronic sensor that mimics the neural information of a tactile sensor in human skin to transmit signals to mouse brain tissue.

For a long time, multiple research teams have been trying to restore touch to prosthetic wearers. For example, two years ago, researchers at Case Western Reserve University in Cleveland, Ohio, reported that they gained tactile sensation by attaching pressure sensors to the peripheral nerves of the prosthetic user's arm.
However, although these results have restored the basic sense of touch, their sensors and signals are still vastly different from the signals transmitted by the natural tactile sensors in the skin, mechanical receptors.
When the mechanical receptors in the human body feel the pressure, they send a nerve pulse; the higher the pressure, the higher the pulse frequency. Previous touch sensors produced stronger electrical signals at higher pressures than high-frequency pulse streams. The electrical signal must be sent to another processing chip that converts the strength of the signal into a stream of digital pulses that are then sent to the surrounding nerve or brain tissue.

Inspired by natural mechanical susceptibility, researchers led by Bao Zhenan, a chemical engineer at Stanford University in Palo Alto, Calif., began to develop artificial skin that directly produces large amounts of digital signals.
According to Bao Zhenan, this is the first flexible artificial skin that senses stress and communicates with the brain, "a step closer" to a truly artificial skin that is truly human skin.
This artificial skin can be divided into two layers, such as "one sheet of paper," which is a sensor that senses pressure, made of plastic material plus carbon nanotubes; and the inner layer is a flexible electron printed by an inkjet printer. The circuit can change the pressure signal into an electrical signal and transmit it to the brain.
Application of tactile sensors in industrial manufacturing
The important role in today's hot industrial Internet is industrial robots. There are almost no ones in the workshops of famous car manufacturers such as Tesla and BMW. They rely on industrial robots for assembly, painting and inspection. This year, Foxconn introduced thousands of robots to replace workers in China, which proves that the adoption of industrial robots in the future is the general trend. The force sensor gives the robot a tactile touch. The force sensor is mounted between the robot and the machine it operates so that all forces between the two can be sensed and monitored by the robot and the machine.

A new keyboard product "101touch", which was launched in 2015, features a completely customizable touch screen. You can change the keyboard layout to suit different needs, such as typing, game operation, and video. Play editing, etc., and even become a cartoon keyboard designed for children.

Application of tactile sensors in wearable electronic products
In recent years, the development of portable intelligent electronic products has been changing with each passing day, and many multifunctional wearable devices have appeared. The use of electronic products for the wear and wear of bracelets, glasses and shoes has become a new fashion. Among them, the wearable touch sensor is one of the most advanced areas of the current technology circle. It can mimic the tactile function when people are in direct contact with the external environment, mainly including the detection of force signals, heat signals and wet signals. It is the nerve ending of the Internet of Things. And assist humans to fully understand nature and their core components.

It is important to develop wearable, new tactile sensor devices that are adaptable to any deformation of the substrate while accurately responding to a variety of irregular tactile stimuli. With the advent of new functional materials such as graphene, carbon nanotubes, zinc oxide, and liquid metal, and the innovation of flexible electronic related preparation technology, the research on wearable tactile sensors has been rapidly developed in recent years.
Wearable tactile sensors are typically constructed on skin-like elastic substrates or retractable fabrics for flexibility and scalability. With the rapid development of materials science, flexible electronics and nanotechnology, the basic performance of the device's sensitivity, range, size and spatial resolution has improved rapidly, even beyond human skin. At the same time, in order to adapt to the sensing requirements of force, heat, humidity, gas, biology, chemistry and other multi-stimulus resolution, the device design is more compact and the integration scheme is more mature. Smart sensor devices with practical functions such as biocompatibility, biodegradability, self-repair, self-energy and visualization have also emerged. In addition, wearable electronic products are moving toward integration, that is, the touch sensor and related functional components (such as power supply, wireless transceiver module, signal processing, actuator, etc.) are effectively integrated for specific applications to create good flexibility and space adaptability. And a functional wearable platform.

At present, wearable tactile sensors still face many challenges in practical applications, such as performance degradation of sensors during repeated deformation, crosstalk decoupling of multiple stimulus simultaneous detection, force, thermal and electrical performance matching between devices inside the wearable platform, etc. . Meeting these challenges will bring new opportunities and indicate future directions for related material preparation, device processing and system integration. There is no doubt that wearable touch sensors will be more flexible, miniaturized, intelligent, multi-functional, and humanized. The scope of application of tactile sensors will be greatly expanded, and it has great application prospects in the fields of human-computer interaction systems, intelligent robots, and mobile medical.
Band BC 5000,Band Vape, Band BC 5000Puffs,Band BC 5000 Puff
Nanning Nuoxin Technology Co., LTD , https://www.nx-vapes.com